Shape Mode
Purpose
- Modify an input plex into any number of different helpful output formats.
Usage
metrical shape <COMMAND> [COMMAND_OPTIONS] <PLEX_OR_RESULTS_PATH> <OUTPUT_DIR>
Concepts
For a single-camera system, a plex is a simple affair. For a complicated multi-component system, plexes can become incredibly complex and difficult to parse. Unlike other calibration systems, MetriCal creates fully connected graphs whenever it can. Everything is related!
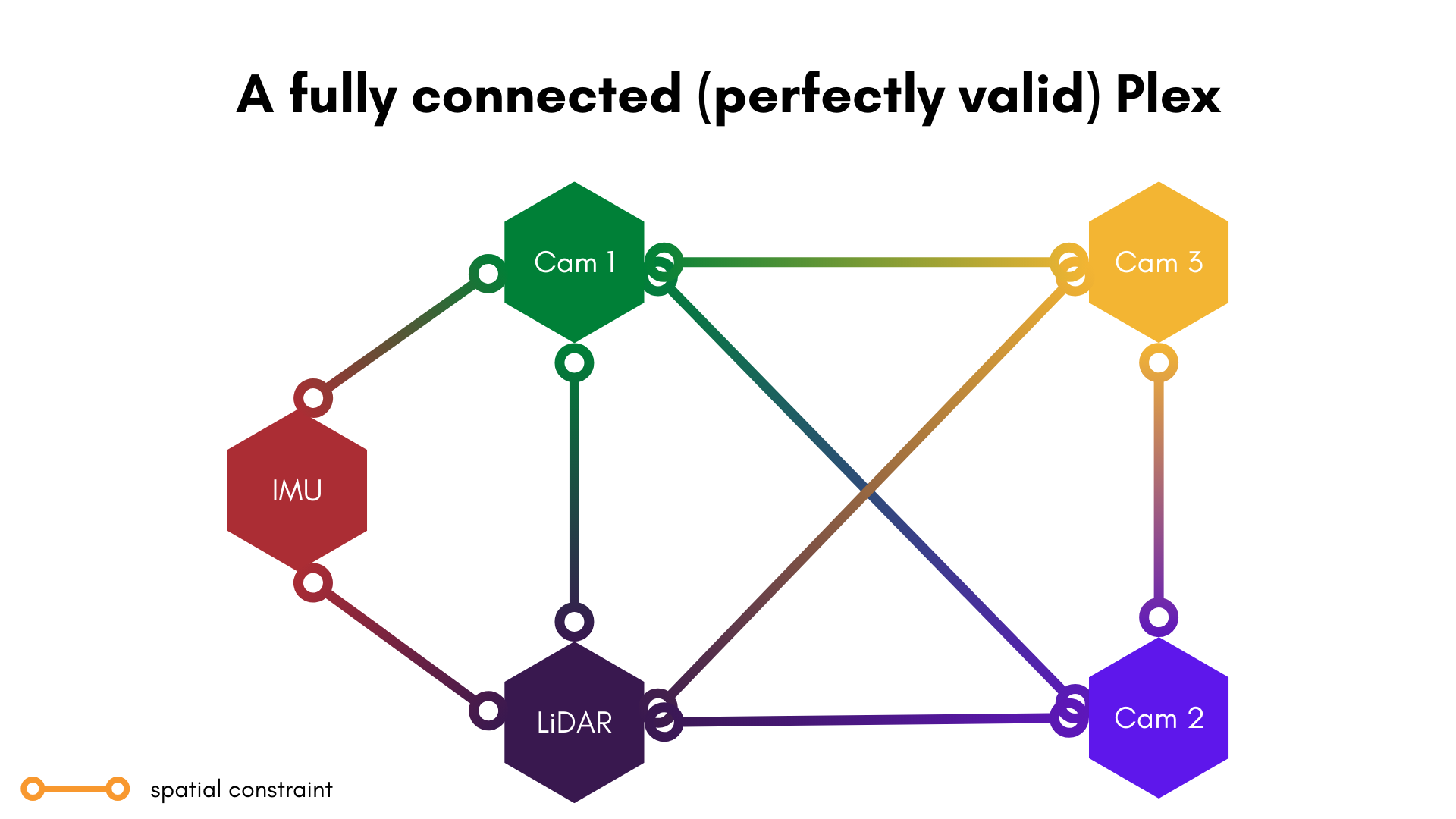
This is where Shape mode comes in handy. Shape modifies a plex into a variety of different and useful configurations. It was created with an eye towards the practical use of calibration data in a deployed system.
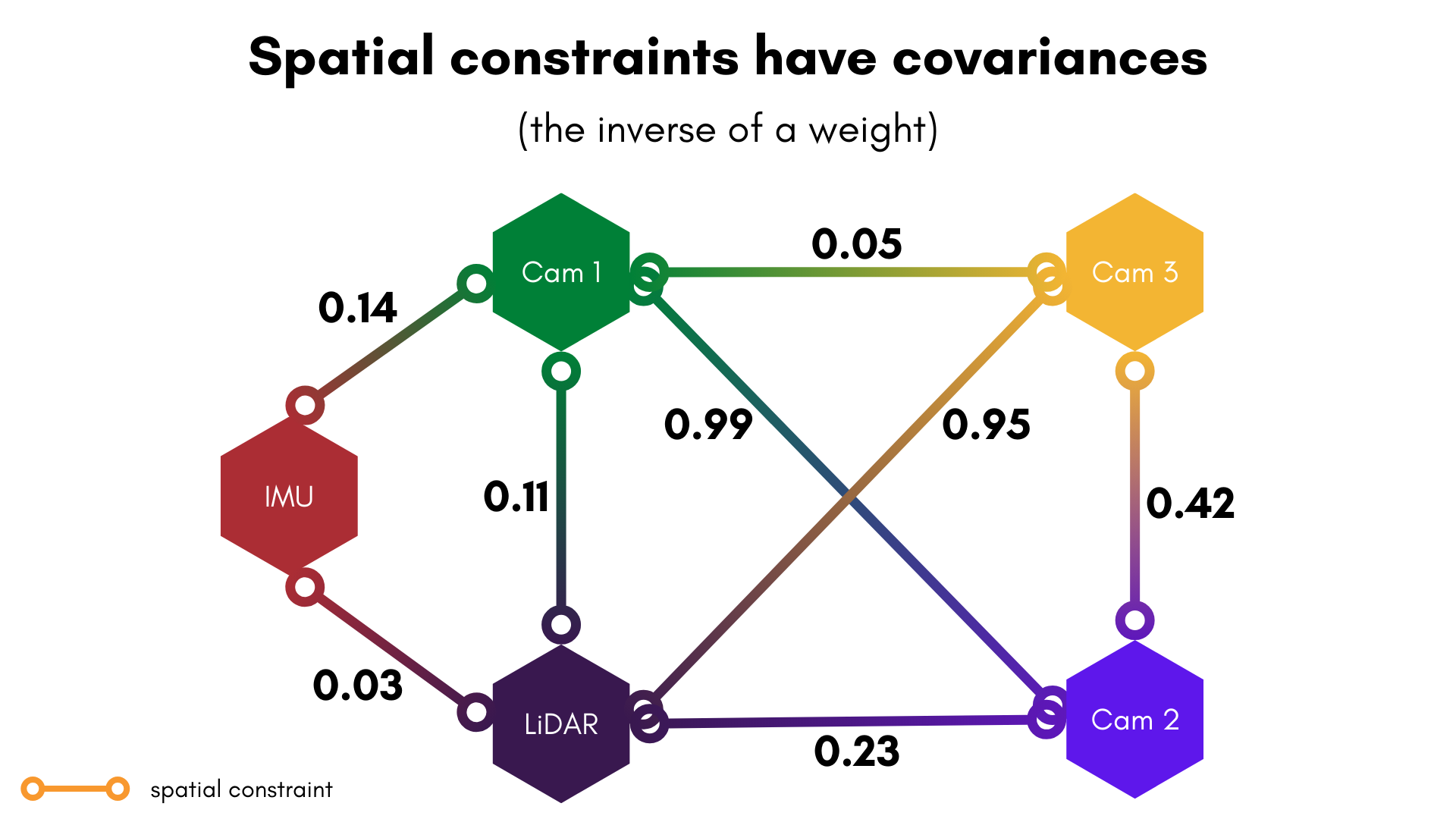
Some Shape commands, like mst and focus, rely on the
covariance of each spatial constraint
in the plex to inform the operation. Since the covariance is a measure of uncertainty, we can use it
to carve out the "most certain" constraints between two components.
Other Shape commands will mutate the plex into something useful for another application, such as the
urdf command for ROS applications.
Commands | Purpose |
|---|---|
focus | Create a plex in which all components are spatially connected to only one "focus" component, i.e. a "hub-and-spoke" plex. |
lut | Create a pixel-wise lookup table for a single camera. |
stereo-lut | Create two pixel-wise lookup tables that produce a rectified stereo pair. |
mst | Create a plex from the Minimum Spanning Tree of all spatial constraints. |
tabular | Re-encodes the calibration data in a plex as a series of compressed tables. |
urdf | Create a ROS-compatible URDF from this plex. |