Circle Edge Misalignment
Overview
Circle Edge Misalignment is similar to the Circle Misalignment metric.
Where the Circle Misalignment cost evaluates the difference between the inferred circle center of the observed ring of retroreflective tape and the known center relative to what a camera observes, the Circle Edge Misalignment instead measures the inferred radius of the observed ring of points in combination with the planar alignment of the circle transform. These are compared to the radius described by the transform in the object-space and expected planar orientation relative to the markerboard (or other target kind).
There is one circle edge misalignment metric group for every circular target in use.
Definition
| Field | Type | Description |
|---|---|---|
metadata | A common metadata object | The metadata associated with the point cloud this circle target was detected in. |
object_space_id | UUID | The UUID of the circle target in the object-space that was observed. |
world_extrinsics | An array of world extrinsics objects | The world pose (camera from object-space) that corerspond to each circle_center_misalignment |
world_extrinsics_component_ids | An array of UUIDs | The camera UUIDs for each world extrinsic in world_extrinsics |
edge_points_x | An array of 64-bit floats | The X-coordinate of the edge points |
edge_points_y | An array of 64-bit floats | The Y-coordinate of the edge points |
edge_points_z | An array of 64-bit floats | The Z-coordinate of the edge points |
edge_distances_from_radius | An array of arrays of 64 bit floats | The individual edge distances for each circle that has a world extrinsic |
edge_distances_from_radius_rmse_per_we | An array of 64 bit floats | The edge distances from radius rmse per world extrinsic |
edge_distances_from_radius_rmse | A 64-bit float | The edge distances RMSE from radius over all world extrinsics |
Analysis
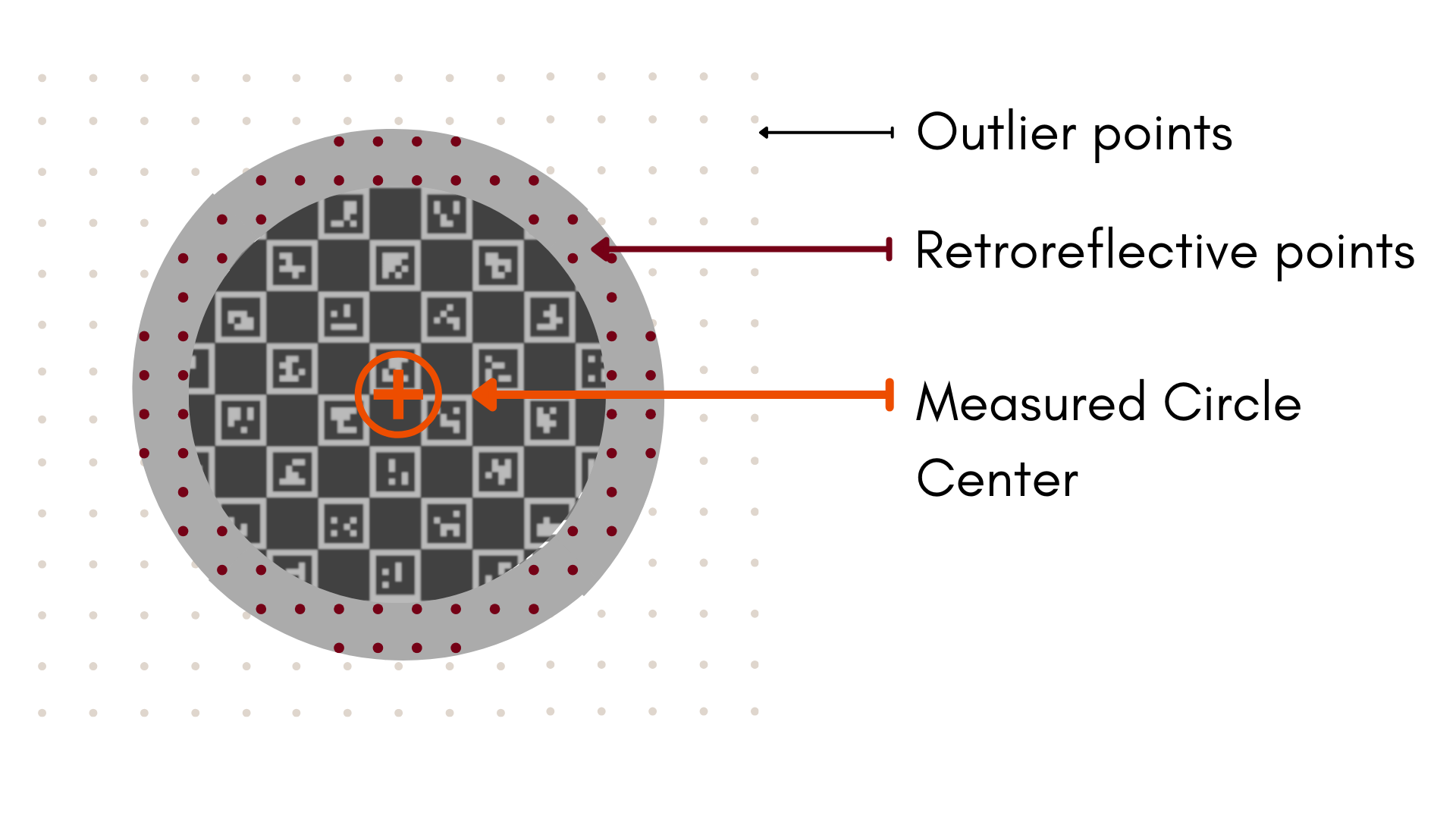
Much of the circle edge misalignment metrics compare the difference in the radius of the circle defined by the retroreflective points (pictured below) and how these edge distances compare to where the edge is expected to be aligned in the Circle target to board relationship (as encoded in the object-space).
The math for getting the LiDAR's observed frame (coordinates of the edge points) is the same as described in the circle misalignment cost.