Interior Points to Plane Error
Overview
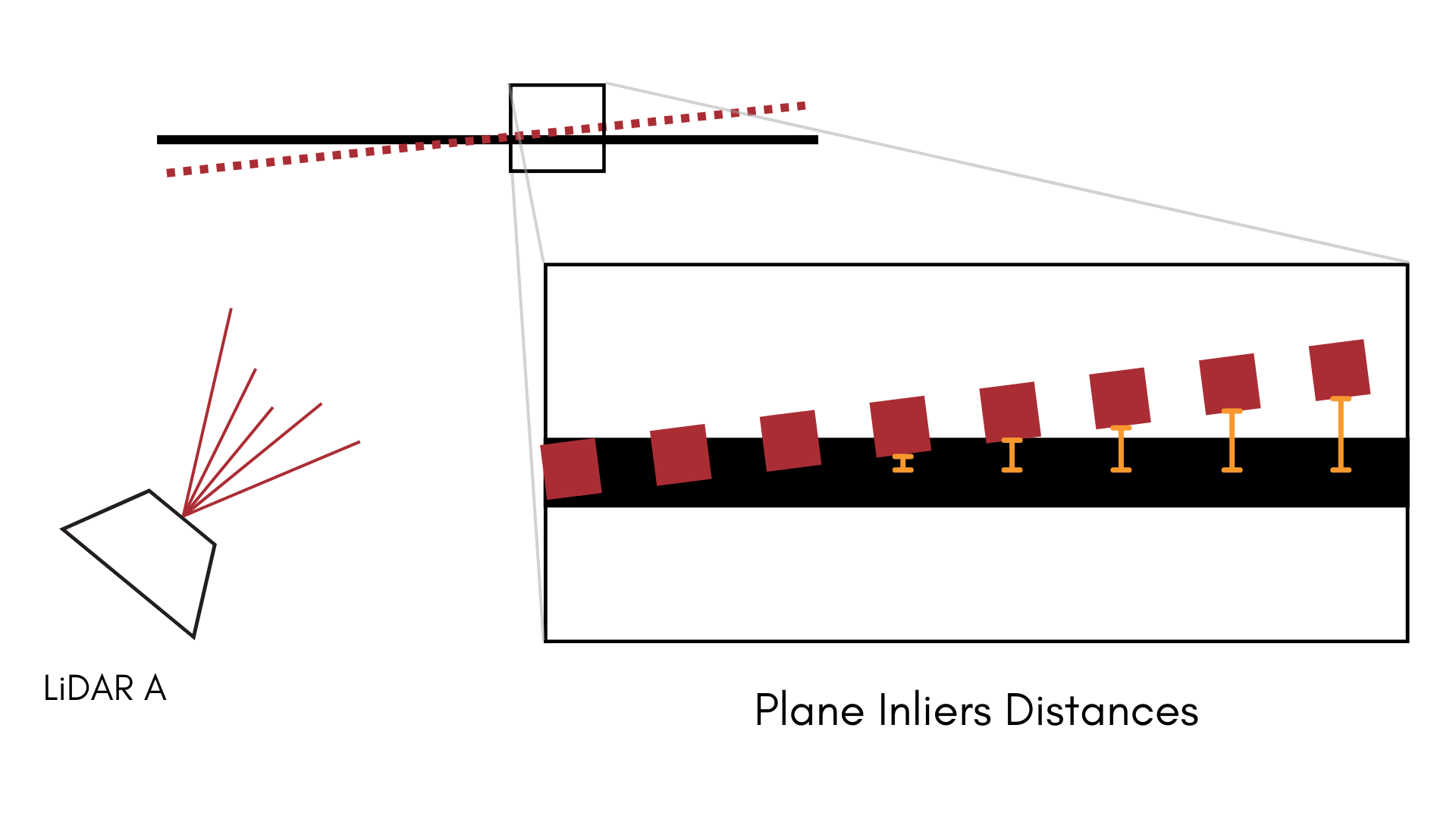
Interior Points to Plane error reflects the error in fit between the LiDAR points observed on the
surface of a circular target, and the actual target. Unlike other metrics, this metric is not
generated in every run. This metric is only produced if the detect_interior_points flag is set to
true in the circle object space detector.
Definition
Interior Points to Plane Error metrics contain the following fields:
Field | Type | Description |
|---|---|---|
metadata | A common metadata object | The metadata associated with the point cloud this circle target was measured in. |
object_space_id | UUID | The UUID of the object space that was being observed. |
plane_inliers_x | An array of floats | All X-coordinates of points contained within the circle target. |
plane_inliers_y | An array of floats | All Y-coordinates of points contained within the circle target. |
plane_inliers_z | An array of floats | All Z-coordinates of points contained within the circle target. |
world_extrinsics_component_ids | An array of UUIDs | The camera UUIDs for each world extrinsic in world_extrinsics |
world_extrinsics | An array of world extrinsics objects | The world pose (camera from object space) that correspond to each circle_center_misalignment |
plane_inliers_distances | An array of arrays of floats | The point-to-plane distances between the plane inlier points and the plane observed at a given world extrinsic. |
plane_distance_rmse_per_we | An array of floats | Similar to plane_inliers_distances but represents the RMSE of all plane inlier distances. |
plane_distance_rmse | Float | The plane inlier distance RMSE over all world extrinsics. |
Analysis
This metric can be considered a companion metric to Circle Misalignment. While circle misalignment measures the error between the observed circle center in LiDAR space and the circle center estimated from each camera, interior points to plane error uses those same derived extrinsics to estimate the error in fit between the LiDAR points observed on the surface of the circle target and the actual target.
Why Optional?
This metric is not generated in every run; it's opt-in. This is because poor quality LiDAR can often given erroneous and erratic distance readings, even on flat surfaces. Using these observations in a calibration would just make things worse, not better. By making this metric optional, we allow the user the option to disregard these readings and just work with the circle center for calibration.