Paired 3D Point Error
Created by: LiDAR-LiDAR pairs
Overview
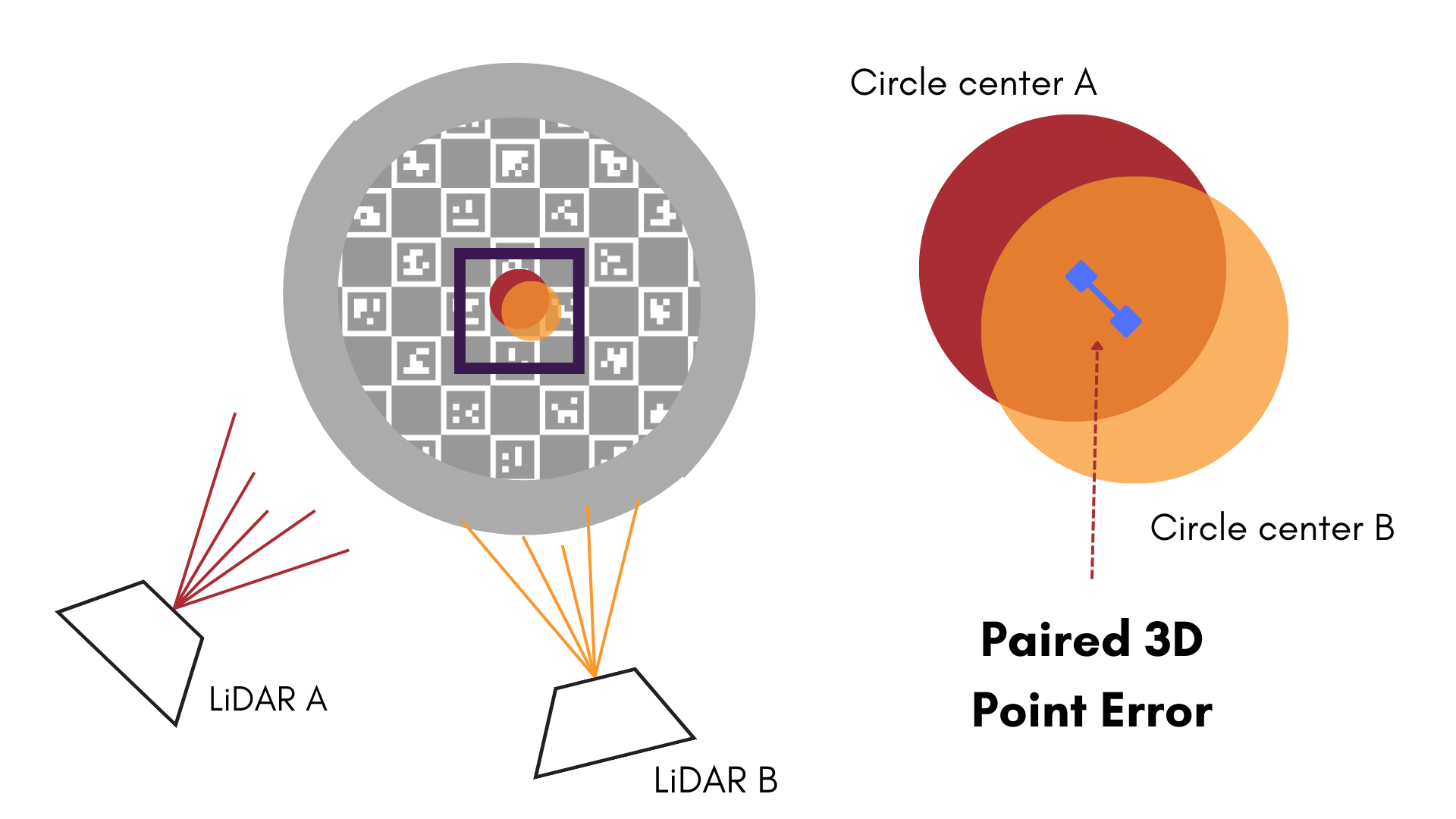
LiDAR points can't be directly compared to each other, but their alignment can be inferred. When MetriCal calibrates two lidars to one another, it uses the detected circle centers from each LiDAR frame of reference to optimize. The difference in these circle centers is the Paired 3D Point Error.
Note that the only LiDAR points used in this calculation are those detected on the retroreflective edge of the circle target; the interior points of the board are not used.
There is a Paired 3D Point Error metric group for every pair of synced observations between LiDARs.
Description
Paired 3D point error metrics contain the following fields:
Field | Type | Description |
|---|---|---|
from | UUID | The "from" component that these point misalignments were computed in reference to. |
to | UUID | The "to" component tha these point misalignments were computed in reference to. |
from_points | An array of arrays of 3 floats | A collection of the XYZ coordinates of points in the "from" coordinate frame being matched against the to_points. |
to_points | An array of arrays of 3 floats | A collection of the XYZ coordinates of points in the "to" coordinate frame being matched against the from_points. |
misalignments | An array of arrays of 3 floats | The transformed distance misalignment (spilt up according to the Cartesian / XYZ axes) between the to and from points. |
rmse | Float | The root-mean-square-error of all the misalignments. |