Object Inertial Extrinsics Error
Created by: IMU
Overview
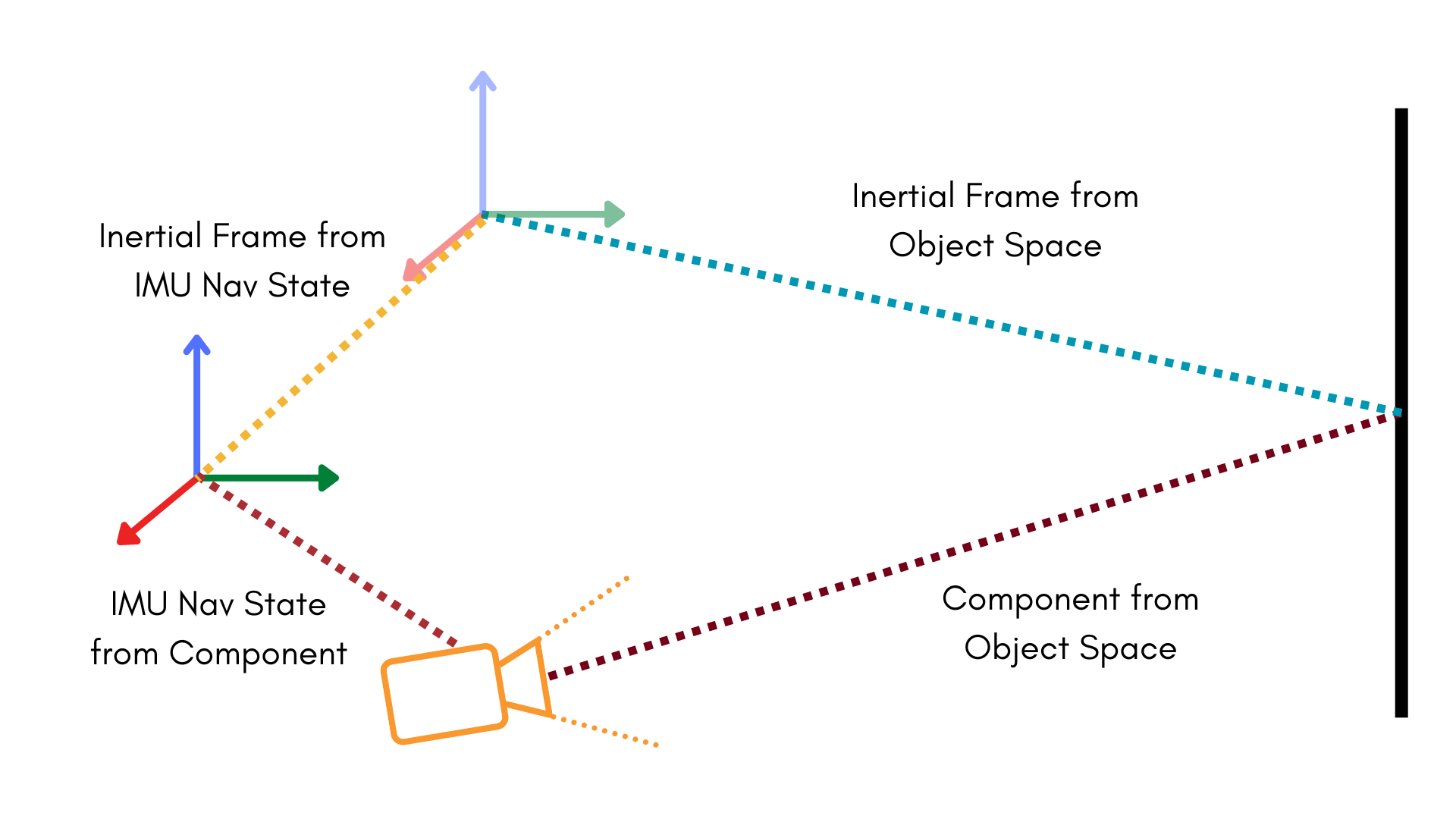
These metrics refer to the error between a sequence of measured and optimized extrinsics involving the IMU. Put in mathematical terms:
- is the inertial frame, a gravity-aligned frame with its origin coincident with the first IMU navigation state
- is the object space
- is the current IMU navigation state
- is any component that can observe the object space directly, e.g. a camera
The transform is the object inertial extrinsic. This calculation is performed for every navigation state of the IMU, since a navigation state directly corresponds to a synced component's observations to the object space in question.
Note that only one of these metrics is created per object space. This metric is closely related to Composed Relative Extrinsics; the strategy is basically the same. However, since IMU cannot directly observe objects, we use the navigation states to infer the relative extrinsics.
Definition
Object inertial extrinsics error metrics contain the following fields:
Field | Type | Description |
|---|---|---|
nav_component_id | UUID | The UUID of the IMU component this metric was generated from. |
navigation_states | An array of extrinsics-velocity objects | The inferred navigation states of the object inertial extrinsic cost. |
world_extrinsics | An array of world extrinsics objects | The inferred world pose (component from world) of the object inertial extrinsic, |
component_relative_extrinsics | An array of extrinsics objects | The inferred component relative extrinsics, |
object_inertial_extrinsics | An array of extrinsics objects | The inferred object inertial extrinsics, |
misalignments | An array of extrinsics objects | The residual error of each object inertial extrisnic. |